
Viewpoint Simulation for Coverage Planning
Overview
The viewpoint_planning package provides a ROS-based framework to spawn a sensor in a Gazebo simulation environment and capture depth and color images from various poses. This package includes the URDF model of the sensor, necessary plugins for depth and color image capturing, and a ROS service to manage the sensor's pose and data capture.
This package is meant as a wrapper for simulating the results of algorithms designed for solving the Coverage Viewpoint Problem.
Features
- URDF Model: Detailed URDF model for the structured light sensor.
- Gazebo Integration: Simulate the sensor in a Gazebo environment with depth and color image capturing capabilities.
- ROS Services: Spawn the sensor at specified poses and capture sensor data.
- TF Management: Manage TF frames for accurate pose representation and data alignment.
Installation
Prerequisites
- ROS (Robot Operating System) Noetic
- Gazebo
- Necessary ROS dependencies
Clone the Repository
cd ~/catkin_ws/src
git clone https://github.com/FarStryke21/viewpoint_planning.gitBuild the package
cd ~/catkin_ws
catkin build
source devel/setup.bashUsage
Launch Simulator
roslaunch viewpoint_planning viewpoint_test.launchSpawn the target model
Define the Gazebo model for your target object in the gazebo_models directory. Call the model using the appropriate rosservice.
rosservice call /load_mesh "mesh_file: 'test_bunny'"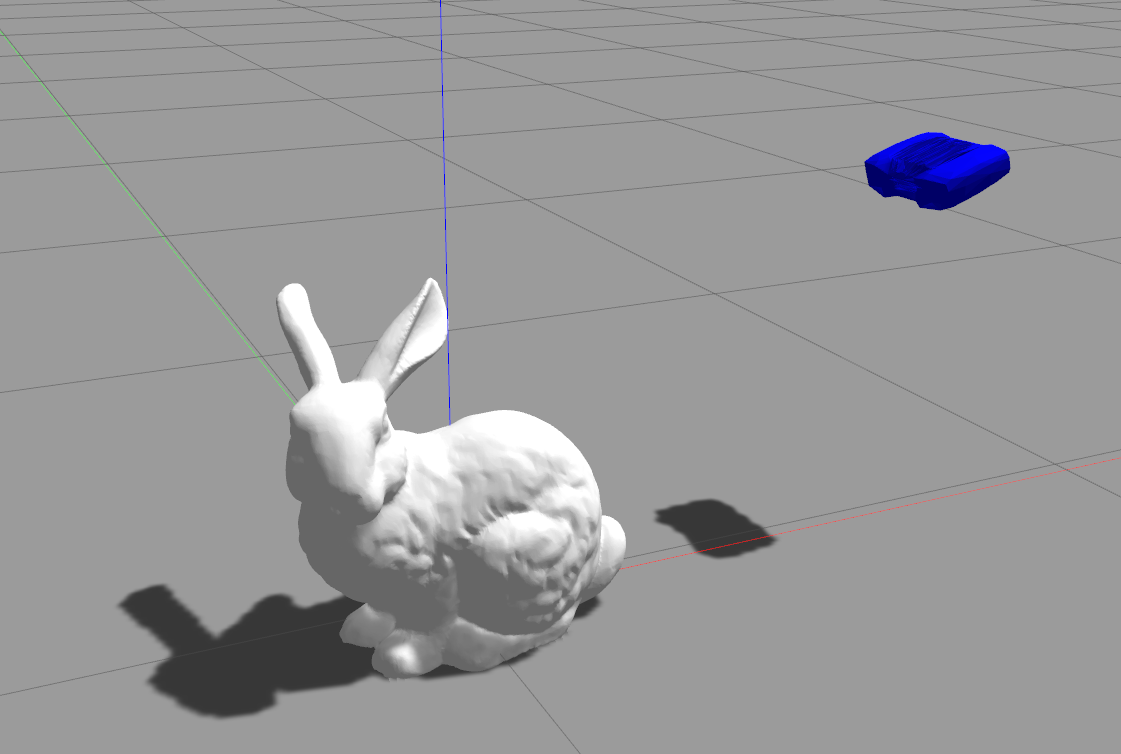
Set initial pose
The pose of the sensor can be changed by sending request calls to /gazebo/set_model_state. Your viewpoint manager should send this service requests. You can also send service commands from a command line terminal or the Gazebo window.
An example of pose sent to the sensor looking directly down is given here:
rosservice call /gazebo/set_model_state "model_state: { model_name: 'structured_light_sensor_robot', pose: { position: { x: 0, y: 0, z: 1.0 }, orientation: { x: 0.0, y: 1.0, z: 0.0, w: 0.0 } }, twist: { linear: { x: 0.0, y: 0.0, z: 0.0 }, angular: { x: 0.0, y: 0.0, z: 0.0 } }, reference_frame: 'world' }"Capture the surface
Surface capture requests can be made through the following rosservice:
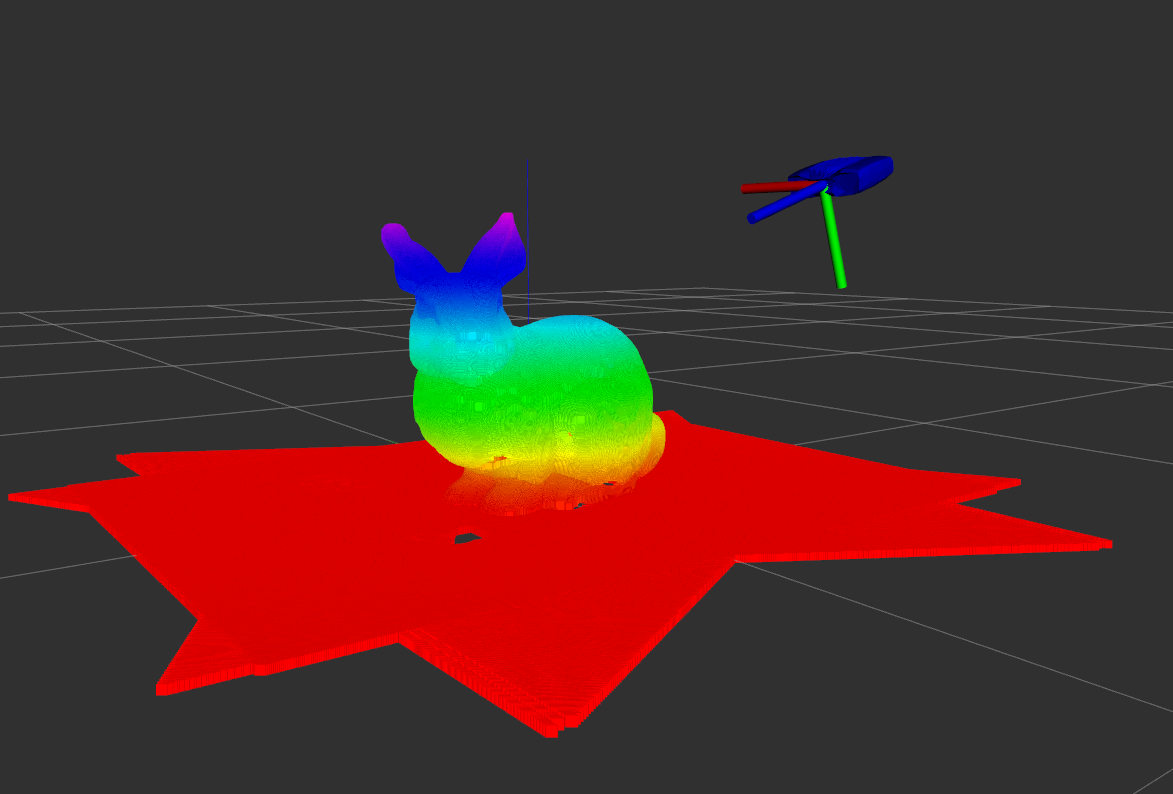
rosservice call /capture_surfaceThis publishes two pointclouds, \current_measurement which provides the last captured surface, and \accumulated_surface which provides the combined surface clouds. The messages are only published during service calls.
Files and Directories
- urdf/: Contains the URDF model files.
- launch/: Contains launch files for starting the Gazebo simulation and RViz.
- meshes/: Contains the mesh files for the sensor model.
- gazebo_models/: Contains the gazebo model descriptions for the target objects.
- config/: Contains configuration files for RViz and Gazebo.
- src/: Contains the source code for the ROS package.
- srv/: Contains the service descriptions for the ROS package.
- CMakeLists.txt: CMake build script.
- package.xml: Package manifest.
Contact
For issues, questions, or contributions, please contact:
Author: Aman Chulawala
GitHub: FarStryke21
Contributions and feedback are always welcome!